Optický lokalizační systém
Automatická lokalizace pohyblivých cílů je základní funkční součástí v mnoha aplikačních doménách, jako je řízení leteckého provozu, řízení robotických pracovišť nebo bezpečnostní systémy. Pakliže je sledovaný cíl vybaven lokalizační senzorikou a data poskytuje, je určení jeho pozice snadné. V některých scénářích však cíl nemůže (selhání navigačních systémů) nebo odmítá (narušitel) zveřejnit údaje o své poloze. V takových případech musí lokalizační systém odhadnout pozici cíle pouze na základě vlastních měření. V dnešní době jsou nejpoužívanějšími zařízeními pro lokalizaci cílů radary, jež však trpí několika zásadními nedostatky: nejsou snadno přenosné a mají velkou spotřebu energie. Navíc se jedná o aktivně vyzařující zařízení a sledovaný cíl tak může přítomnost radaru detekovat, což může být především pro obranné aplikace nepřijatelné. Proto jsme vyvinuli semiautonomní pasivní více kamerový systém schopný sledovat a lokalizovat vzdálené objekty za pomocí RGB kamer.
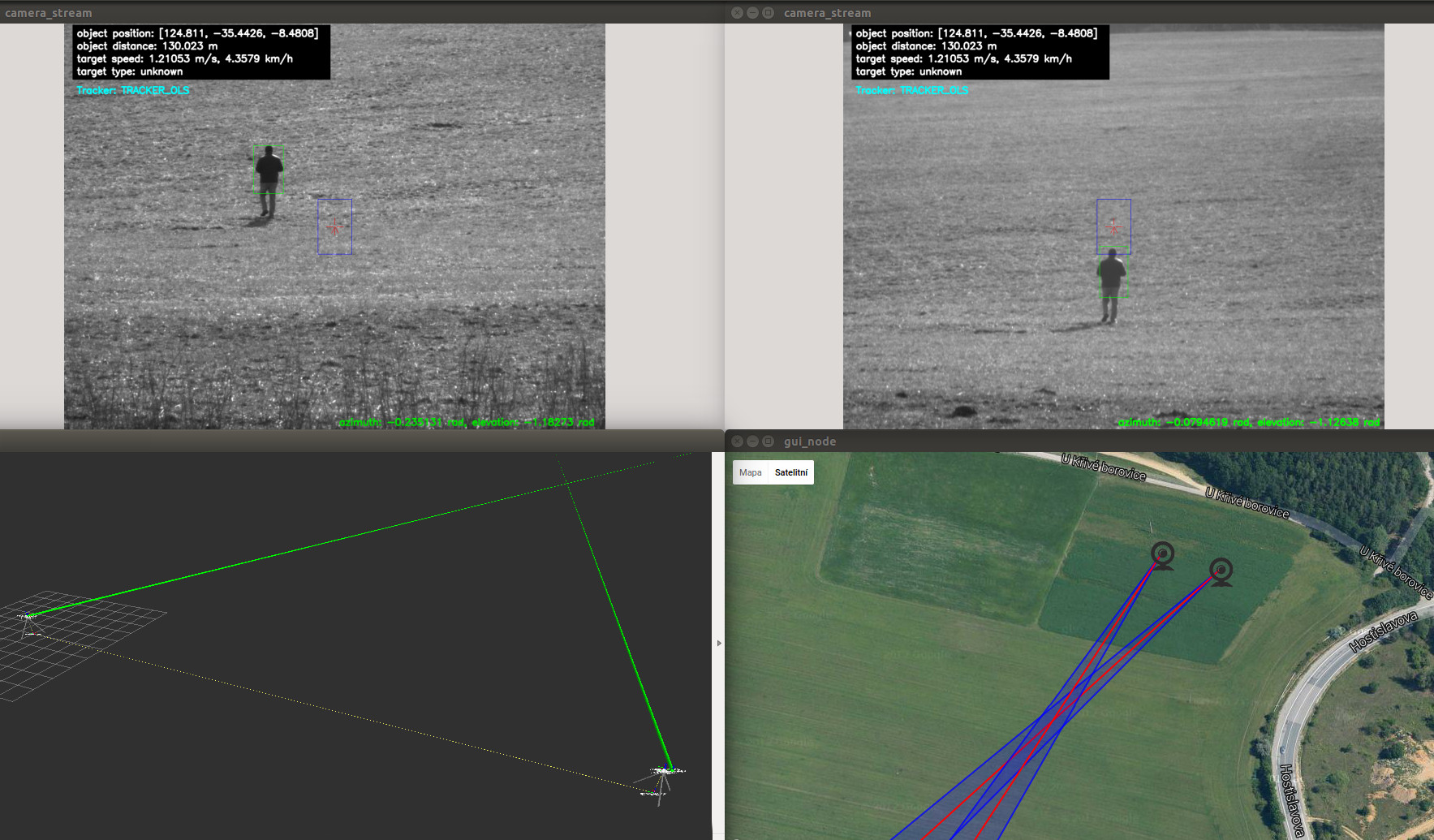
Přehled systému
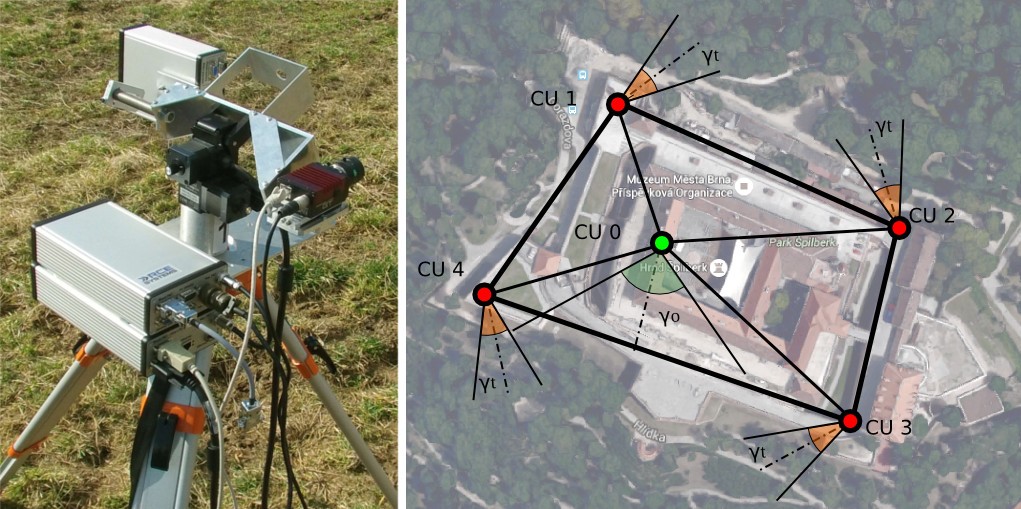
Základní součástí systému je kamerová jednotka, skupina hardwarových zařízení obsahující pozicovatelnou kameru a různou senzoriku schopnou určit vlastní geografickou pozici. Systém je navržen tak, aby pracoval s libovolným množstvím kamerových jednotek, jež je nutné v prostoru rozmístit tak, aby pokrývaly chráněný prostor. Detekce cíle je prováděna manuálně operátorem, zatímco vizuální sledování cíle je automatické a je založené na dvojici state-of-the-art přístupů. Odhad 3D pozice cíle je založen na triangulaci z více pohledů a je robustní vůči nepřesnostem měření z jednotlivých kamerových jednotek. Systém zobrazuje odhadovanou pozici cíle v interaktivní mapě a průběžně publikuje odpovídající UTM souřadnice. Kamery byly kalibrovány pomocí speciálně navržených kalibračních terčů s využitím metodologie, jejímž cílem je potlačit nejvýznamnější zdroje chyb.
Využití více kamerových jednotek
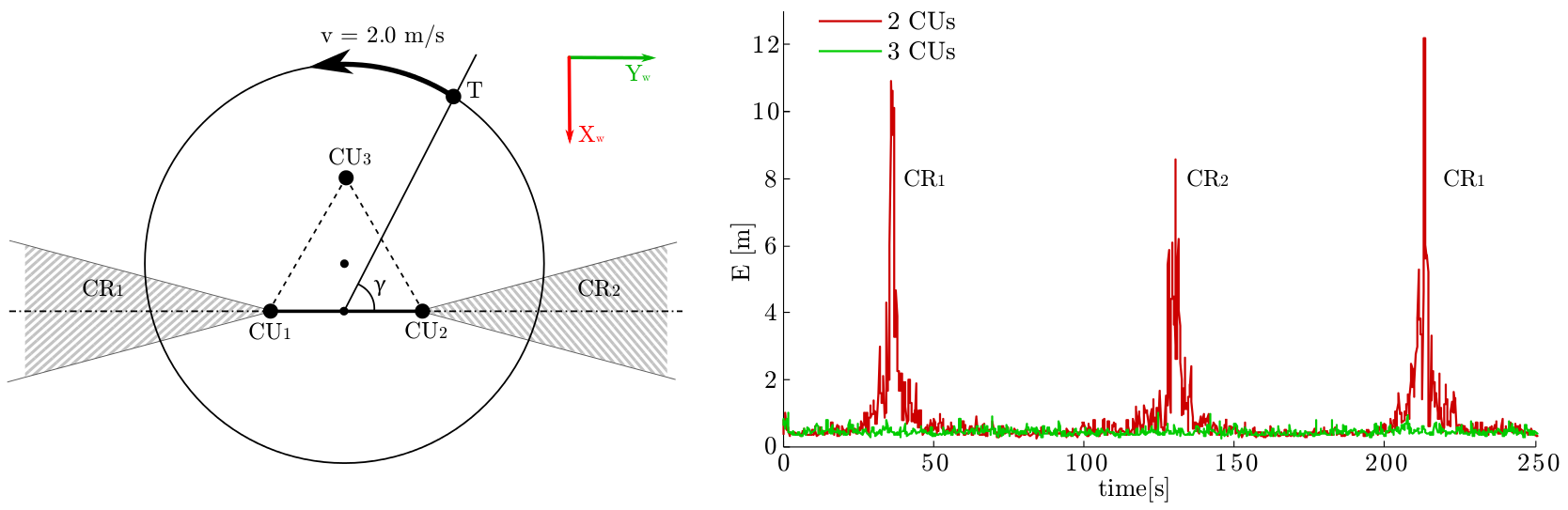
Hlavní předností systému je fakt, že pracuje s libovolným počtem kamerových jednotek a může tak díky kombinaci několika hypotéz zpřesňovat odhadovanou pozici cíle. Lze snadno ukázat, že ve srovnání s vícekamerovou topologií může využití pouhých dvou kamer v určitých případech zapříčinit výraznou chybovost lokalizace. Uvažujeme-li scénář, kdy jsou požity dvě kamerové jednotky a cíl pohybující se po kružnici okolo kamerových jednotek, lze v prostoru vytyčit dvě kritické oblasti (tvaru kužele), v nichž chyba lokalizace prudce roste. Pakliže je však topologie rozšířena o pouhou jednu kamerovou jednotku, vliv původních kritických oblastí je potlačen a chyba lokalizace je minimalizována.
Hardware
Kamerová jednotka sestává z geodetického stativu, P&T jednotky Flir PTU-D46-70, kamery Prosilica GT 1290C (RGB, 1280×960 px, 33,3 FPS) a desktopu s následujícími hardwarovými parametry: CPU Intel Core i5 4590 @ 3.3 Ghz x 4, GPU Nvidia GeForce GTX 760, 4 GB RAM.
Software
Systém je implementován v C++ a staví na frameworku ROS (Robot Operating System) a fyzikálním simulátoru Gazebo. Některé výpočetně náročné části vizuálního sledování jsou akcelerovány na GPU pomocí technologie CUDA.
Video
Využití
Systém byl navržen s ohledem na dosažení mobility a umožnění dočasného nasazení. Díky modularitě je možné systém libovolně škálovat a rychle nasadit pro širokou škálu aplikačních scénářů, jako je monitorování chráněného území, včasná detekce hrozby v bezpečnostních systémech nebo řízení letového provozu ve veřejném sektoru.
Features
Awards
Systém byl prezentován na konferenci Excel@FIT 2016 – studentské konferenci inovací, technologií a vědy v IT, jež se uskutečnila dne 30.4.2015 pod záštitou Fakulty informačních technologií Vysokého učení technického v Brně dne 4. května 2016. Projekt získal dvě ocenění od odborné veřejnosti i od odborného panelu za spojení vědeckého a praktického přístupu s implementací a možností praktického využití.